Show off your armies and weaponry and stuff.
Moderators: Zahru II, Bragallot, RedRover, Natalya
-
Natalya
- I've trolled before.
- Posts: 4677
- Joined: Wed Sep 17, 2008 10:57 pm
- Location: Atlanta
-
Contact:
Post
by Natalya » Fri Dec 23, 2011 5:54 pm
Other thread is kinda long, so here I will share the first pictures of my progress.

This is the tentative design for the legs for the Spider Tank i am developing. I may make some cosmetic changes between now and when the whole model is finished, but the methods of articulation used by this leg will probably stay the same.
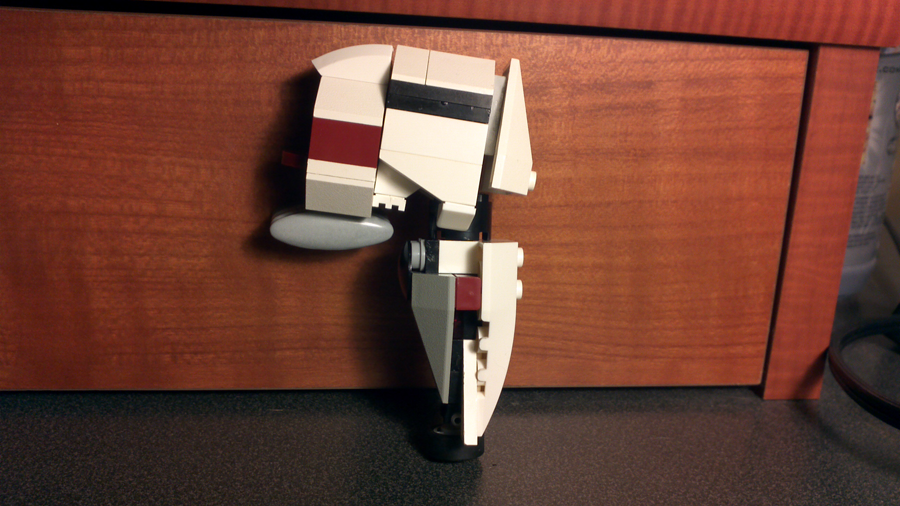
The leg has three segments, two upper and one lower. It can walk upright in this configuration.
A look at the underside of the leg reveals the four points of articulation. The upper leg is split into two parts that can rotate independently of eachother. Then is the 'elbow' or 'knee' joint which allows the lower leg to rotate out from underneath the upper leg. Past the round black 2x2 brick buried inside the lower leg there is a mechanism to rotate that around its axis. Then finally, the wheel can be angled in for the tank to drive on it, or it can be pointed down like in the second picture so that the tank can walk on it.
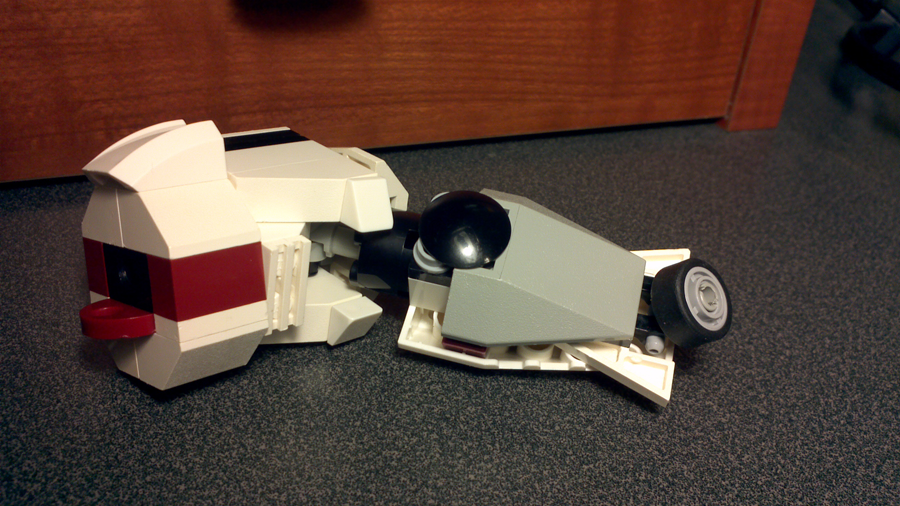
This is the ideal driving configuration.

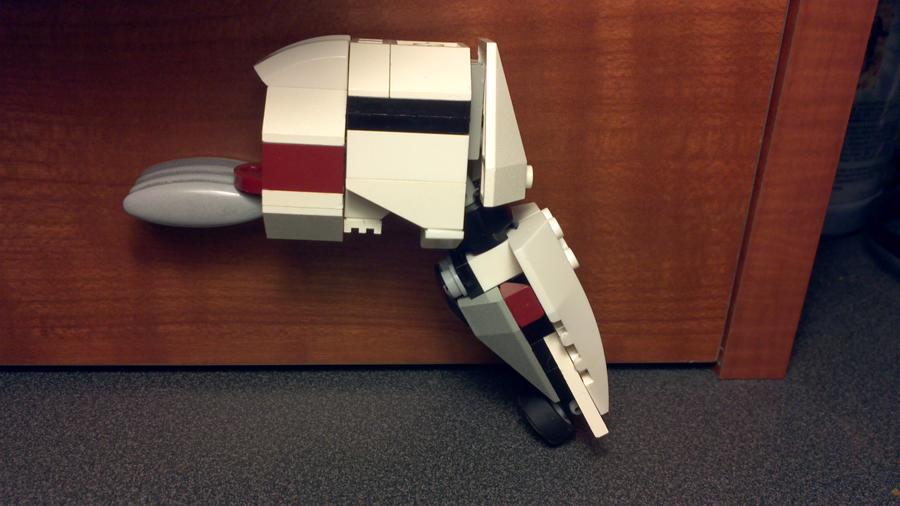
This pose shows the full range of motion and how the legs will allow the tank to walk over difficult terrain.

Here are more parts for two more legs. The bricks at front right show how I made the rotating core of the lower leg. I used a similar method for the core of the upper leg.
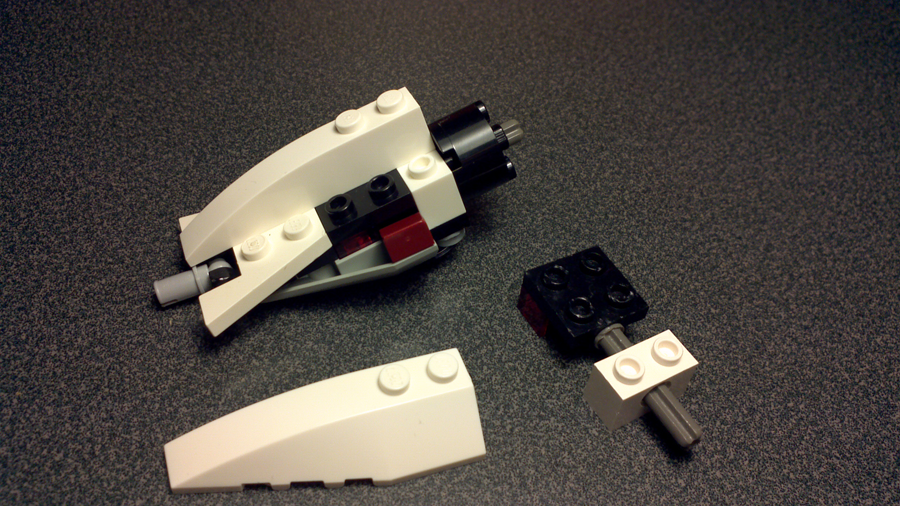
Having the legs rotate in this manner allows for a greater range of motion than the ball click joints, but does not sacrifice stability. There is more friction generated here than regular black technic friction pins could provide, so the tank will have enough stability and articulation for play and posing.
▲
▲ ▲
"Ya gotta remember, Soryu's a brutal thug, ain't got no finesse like Shinji."
-
Robot Monkey
- My Little Pony
- Posts: 1935
- Joined: Tue Nov 02, 2010 8:47 pm
- Location: The Edge
Post
by Robot Monkey » Fri Dec 23, 2011 6:08 pm
Looking great so far, Nat! Can't wait to see it finished!
Also, Are you a member of Anonymous? I saw their card in one of the pictures.
-
Whiteagle
- whiteeagle problems

- Posts: 1286
- Joined: Wed Dec 14, 2011 1:30 pm
Post
by Whiteagle » Fri Dec 23, 2011 6:34 pm
Damn that's impressive...
Can't wait to see how you did the Knee so I can copy that as well!

-
Azshuran Empire
- Champion

- Posts: 28
- Joined: Sat Jun 11, 2011 8:05 pm
- Location: preparing for dimensional incursion of dimension layer title-27459277
Post
by Azshuran Empire » Fri Dec 23, 2011 6:47 pm
Whiteagle wrote:Damn that's impressive...
Can't wait to see how you did the Knee so I can
*take an arrow to the knee* as well!

the empire is hidden, but it is not hiding. it is waiting. and like a sleeping giant will wake with consequences as of yet unseen in the brikverse. unimaginable destruction will ensue leaving ruins in its trail.
-
heavyfishcannon
- Minifig
- Posts: 276
- Joined: Sun Aug 14, 2011 4:17 pm
- Location: On my roof, watching the world burn
Post
by heavyfishcannon » Fri Dec 23, 2011 9:07 pm
Nice start, how does it look compared to an average minifig? If it has 8 legs, it should be able to crush 8 figs!

"there are no bystanders in the battle for survival. anyone who will not fight by your side is an enemy you must crush"
-
mgb519
- My Little Pony
- Posts: 1945
- Joined: Thu May 26, 2011 8:50 pm
- Location: ATL
Post
by mgb519 » Fri Dec 23, 2011 9:56 pm
...Assuming that it doesn't need the legs to stand. Hover jets?
Tzan wrote:Semaj Nagirrac wrote:Well, I took some land without checking if it was owned by a faction or not. I'm not going to be banned, am I? I can destroy everything if need be.
That's what
Hitler said,
in 1938.
-
Natalya
- I've trolled before.
- Posts: 4677
- Joined: Wed Sep 17, 2008 10:57 pm
- Location: Atlanta
-
Contact:
Post
by Natalya » Sat Dec 24, 2011 1:47 am
It will use the legs to stand and it will have 4 of them.
Robot Monkey wrote:Also, Are you a member of Anonymous? I saw their card in one of the pictures.
Never Forgive
Never Forget
▲
▲ ▲
"Ya gotta remember, Soryu's a brutal thug, ain't got no finesse like Shinji."
-
Insert_blank
- おたく

- Posts: 934
- Joined: Wed Dec 14, 2011 10:44 pm
- Location: Pumpkin Kingdom
Post
by Insert_blank » Sat Dec 24, 2011 2:05 am
For some reason I thought the handle for your drawer was a Lego element and I was trying to figure out what it was and what you were using it for...

Anyway this looks awesome! Obviously you're a great builder but what is your thought process for designing usually? What are your big building influences? What I mean is how did you come up with this design?
Just Monika
-
Natalya
- I've trolled before.
- Posts: 4677
- Joined: Wed Sep 17, 2008 10:57 pm
- Location: Atlanta
-
Contact:
Post
by Natalya » Sat Dec 24, 2011 2:35 am
Insert_blank wrote:For some reason I thought the handle for your drawer was a Lego element and I was trying to figure out what it was and what you were using it for...
Anyway this looks awesome! Obviously you're a great builder but what is your thought process for designing usually? What are your big building influences? What I mean is how did you come up with this design?
http://www.brikwars.com/forums/viewtopic.php?f=8&t=8677
Are you a spambot or are you really from China? ▲
▲ ▲
"Ya gotta remember, Soryu's a brutal thug, ain't got no finesse like Shinji."
-
Zahru II
- I kinda like it if the lady's dominant...

- Posts: 4462
- Joined: Fri Jul 24, 2009 6:22 am
-
Contact:
Post
by Zahru II » Sat Dec 24, 2011 3:42 am
That ball joint pin-socket-tire combination for the tip of the leg is quite ingenious.
-
Insert_blank
- おたく
- Posts: 934
- Joined: Wed Dec 14, 2011 10:44 pm
- Location: Pumpkin Kingdom
Post
by Insert_blank » Sat Dec 24, 2011 4:08 am
@Natalya: I live here, not from. I'm from the USA but I'm an English as Second Language teacher over here.
Just Monika
-
BFenix
- Pooplord
- Posts: 4112
- Joined: Wed Jan 06, 2010 2:13 pm
- Location: City Of Ravens (Lisbon)
-
Contact:
Post
by BFenix » Sat Dec 24, 2011 12:01 pm
Leg assembly. A vital part in mech building. You seem to be going on the right path Natty, looking forward to the next progression.
-
The Shadowscythe
- Touch my cloud song and I will fuck you up

- Posts: 2351
- Joined: Sun Jul 27, 2008 7:22 am
- Location: Llandysul, Ceredigion, Wales, U.K, Earth, Sol, Milky Way, Local Cluster, Universe.
Post
by The Shadowscythe » Sat Dec 24, 2011 1:27 pm
Now this I am looking forward too Nat, I remember you saying some time ago that you thought the scythian tarantula was awesome - so an Assyrian spider tank is a compliment beyond measure for me.
I am loving the leg design thus far - please for the love of all things brick keep us up to date.
-- WARNINK -- LINK BELOW IZ KNOWN TO CAUZE HEMMORAGE --

I WARNED YOU, DIDN'T I WARN YOU?! BLAME RAYHAWK DAMNIT.












